

Some problems require performance that only massively parallel computers offer whose programming is still difficult. Works on functional programming and parallelism can be divided in two categories: explicit parallel extensions of functional languages — where languages are either non-deterministic [30] or non-functional [2, 10] — and parallel implementations with functional semantics [1] — where resulting languages do not express parallel algorithms directly and do not allow the prediction of execution times. Algorithmic skeleton languages [7, 31], in which only a finite set of operations (the skeletons) are parallel, constitute an intermediate approach. Their functional semantics is explicit but their parallel operational semantics is implicit. The set of algorithmic skeletons has to be as complete as possible but it is often dependent on the domain of application.
The design of parallel programming languages is therefore a tradeoff between:
We are exploring thoroughly the intermediate position of the paradigm of algorithmic skeletons in order to obtain universal parallel languages where execution cost can be easily determined from the source code (in this context, cost means the estimate of parallel execution time). This last requirement forces the use of explicit processes corresponding to the parallel machine’s processors. Bulk Synchronous Parallel (BSP) computing [28] is a parallel programming model which uses explicit processes, offers a high degree of abstraction and yet allows portable and predictable performance on a wide variety of architectures.
A denotational approach led us to study the expressiveness of functional parallel languages with explicit processes [16] but this is not easily applicable to BSP algorithms. An operational approach has led to a BSP λ-calculus that is confluent and universal for BSP algorithms [26], and to a library of bulk synchronous primitives for the Objective Caml [21] language which is sufficiently expressive and allows the prediction of execution times [15].
This framework is a good tradeoff for parallel programming because:
The version 0.1 of our BSML library implements the BSλ-calculus primitives using Objective Caml [21] and BSPlib [17] and its performance follows curves predicted by the BSP cost model [3]. This environment is a safe one. Our language is deterministic, is based on a parallel abstract machine [29] which has been proved correct w.r.t. the confluent BSλp-calculus [22] using an intermediate semantics [23]. A polymorphic type system [12] has been designed, for which type inference is possible. The small number of basic operations allows BSML to be taught to BSc. students.
The BSPlib library is no longer supported nor updated. Moreover BSML is used as the basis for the Caraml project which aims to use Objective Caml for Grid computing with, for example, applications to parallel databases and molecular simulation. In such a context, the parallel machine is no longer a homogeneous machine as prescribe by the BSP model and global synchronisation barriers are too costly. Thus we will need encapsulated communications between differents architectures and subset synchronization [33]. The version 0.2 of the BSML library is hence based on MPI [35]. It also has a smaller number of primitives which are closer to the BSλ-calculus than the primitives of the version 0.1. In version 0.1, communication primitives manipulate parallel vectors of lists and parallel vectors of hash tables and are less easy to be taught.
The version 0.4 [25] adds the following features:
The section 1.1 presents the BSP model, section 1.2 explains why processes should be explicit in parallel programming languages and compares our approach with the SPMD paradigm. Section 1.3 gives an overview of the core BSML library.
The Bulk Synchronous Parallel (BSP) model [36, 27, 34] describes: an abstract parallel computer, a model of execution and a cost model. A BSP computer has three components: a homogeneous set of processor-memory pairs, a communication network allowing inter processor delivery of messages and a global synchronization unit which executes collective requests for a synchronization barrier. A wide range of actual architectures can be seen as BSP computers.
The performance of the BSP computer is characterized by three parameters (expressed as multiples the local processing speed): the number of processor-memory pairs p ; the time l required for a global synchronization ; the time g for collectively delivering a 1-relation (communication phase where every processor receives/sends at most one word). The network can deliver an h-relation (communication phase where every processor receives/sends at most h words) in time g× h. Those parameters can easily be obtained using benchmarks [17].
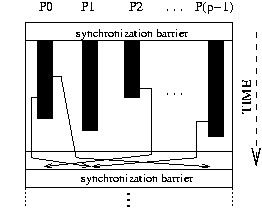
A BSP program is executed as a sequence of super-steps, each one divided into (at most) three successive and logically disjointed phases (Fig. 1.1):
The execution time of a super-step s is, thus, the sum of the maximal local processing time, of the data delivery time and of the global synchronization time:
| Time(s)= |
| wi(s) + |
| hi(s)× g + l |
where wi(s)= local processing time on processor i during super-step s and hi(s)=max{hi+(s),hi−(s)} where hi+(s) (resp. hi−(s)) is the number of words transmitted (resp. received) by processor i during super-step s.
The execution time ∑sTime(s) of a BSP program composed of S super-steps is, therefore, a sum of 3 terms:
| W + H× g + S× l where | ⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩ |
|
In general, W,H and S are functions of p and of the size of data n, or of more complex parameters like data skew. To minimize execution time, the BSP algorithm design must jointly minimize the number S of super-steps, the total volume h with imbalance of communication and the total volume W with imbalance of local computation.
Bulk Synchronous Parallelism (and the Coarse-Grained Multicomputer, CGM, which can be seen as a special case of the BSP model) is used for a large variety of applications: scientific computing [5, 19], genetic algorithms [6] and genetic programming [8], neural networks [32], parallel databases [4], constraint solvers [13], etc. It is to notice that “A comparison of the proceedings of the eminent conference in the field, the ACM Symposium on Parallel Algorithms and Architectures, between the late eighties and the time from the mid nineties to today reveals a startling change in research focus. Today, the majority of research in parallel algorithms is within the coarse-grained, BSP style, domain” [9].
Among researchers interested in declarative parallel programming, there is a growing interest in execution cost models taking into account global hardware parameters like the number of processors and bandwidth. With similar motivations we are designing an extension of ML called BSML for which the BSP cost model facilitates performance prediction. Its main advantage in this respect is the use of explicit processes: the map from processors to data is programmed explicitly and does not have to be recovered by inverting the semantics of layout directives.
In BMSL, a parallel value is built from an ML function from processor numbers to local data. A computation superstep results from the pointwise application of a parallel functional value to a parallel value. A communication and synchronization superstep is the application of a communication template (a parallel value of processor numbers) to a parallel value. A crucial restriction on the language’s constructors is that parallel values are not nested. Such nesting would imply either dynamic process creation or some non-constant dynamic costs for mapping parallel values to the network of processors, both of which would contradict our goal of direct-mode BSP programming.
The popular style of SPMD programming in a sequential language augmented with a communication library has some advantages due to its explicit processes and explicit messages. In it, the programmer can write BSP algorithms and control the parameters that define execution time in the cost model. However, programs written in this style are far from being pure-functional: they are imperative and even non-deterministic. There is also an irregular use of the pid (Processor ID i.e. processor number) variable which is bound outside the source program. Consider for example p static processes (we refer to processes as processors without distinction) given an SPMD program E to execute. The meaning of E is then
| [[ E ]]SPMD = [[ E@0 || … || E@(p−1) ]]CSP |
where E@i = E[pid ← i] and [[ E ]]CSP refers to concurrent semantics defined by the communication library, for example the meaning of a CSP process [18]. This scheme has two major disadvantages. First, it uses concurrent semantics to express parallel algorithms, whose purpose is to execute predictably fast and are deterministic. Secondly, the pid variable is used without explicit binding. As a result there is no syntactic support for escaping from a particular processor’s context to make global decisions about the algorithm. The global parts of the SPMD program are those which do not depend on any conditional using the pid variable. This dynamic property is thus given the role of defining the most elementary aspect of a parallel algorithm, namely its local vs global parts.
We propose to eliminate both of these problems by using a minimal set of algorithmic operations having a BSP interpretation. Our parallel control structure is analogous to the PAR of Occam [20] but without possibility of nesting. The pid variable is replaced by a normal argument to a function within a parallel constructor. The property of being a local expression is then visible in the syntax and types. The current implementation of BSML is the BSML library, which is described below.
There is currently no implementation of a full Bulk Synchronous Parallel ML language but rather a partial implementation: a library for Objective Caml. The so-called BSML library is based on the following elements.
It gives access to the BSP parameters of the underling architecture. In particular, it offers the constants bsp_p: int such that the value of bsp_p is p, the static number of processes of the parallel machine. The value of this variable does not change during execution (for “flat” programming, this is not true if a parallel juxtaposition is added to the language [24]).
There is also an abstract polymorphic type ’a par which represents the type of p-wide parallel vectors of objects of type ’a, one per process. The nesting of par types is prohibited. Our type system enforces this restriction [11]. This improves on the earlier design DPML/Caml Flight [14, 10] in which the global parallel control structure sync had to be prevented dynamically from nesting.
This is very different from SPMD programming (Single Program Multiple Data) where the programmer must use a sequential language and a communication library (like MPI [35]). A parallel program is then the multiple copies of a sequential program, which exchange messages using the communication library. In this case, messages and processes are explicit, but programs may be non deterministic or may contain deadlocks.
Another drawback of SPMD programming is the use of a variable containing the processor name (usually called “pid” for Process Identifier) which is bound outside the source program. A SPMD program is written using this variable. When it is executed, if the parallel machine contains p processors, p copies of the program are executed on each processor with the pid variable bound to the number of the processor on which it is run. Thus parts of the program that are specific to each processor are those which depend on the pid variable. On the contrary, parts of the program which make global decision about the algorithms are those which do not depend on the pid variable. This dynamic and undecidable property is given the role of defining the most elementary aspect of a parallel program, namely, its local vs global parts.
The parallel constructs of BSML operate on parallel vectors. Those parallel vectors are created by:
so that (mkpar f) stores (f i) on process i for i between 0 and (p−1). We usually write f as fun pid->e to show that the expression e may be different on each processor. This expression e is said to be local. The expression (mkpar f) is a parallel object and it is said to be global.
The dual operation of mkpar is:
This primitive requires a full super-step to be evaluated. It should not be evaluated in the context of a mkpar.
A BSP algorithm is expressed as a combination of asynchronous local computations (first phase of a super-step) and phases of global communication (second phase of a super-step) with global synchronization (third phase of a super-step). Asynchronous phases are programmed with mkpar and with:
apply (mkpar f) (mkpar e) stores (f i) (e i) on process i. Neither the implementation of BSML, nor its semantics [23] prescribe a synchronization barrier between two successive uses of apply.
Readers familiar with BSPlib [34, 17] will observe that we ignore the distinction between a communication request and its realization at the barrier. The communication and synchronization phases are expressed by:
Consider the expression: put(mkpar(fun i->fsi)) (*)
To send no value from process j to process i, ( fsj i) must evaluate to a value v such as Tools.is_empty v is true. Such values include the empty list, the None value of type ’a option, the value of type unit and any first constant constructor in a sum type. To send a value v from process j to process i, the function fsj at process j must be such as ( fsj i) evaluates to v and v is such as Tools.is_empty v is false.
Expression (*) evaluates to a parallel vector containing a function fdi of delivered messages on every process. At process i, (fdi j) evaluates to the empty value of the type if it exists and if process j sent no message to process i or evaluates to v if process j sent the value v to the process i.
For example, one can define get_one such that :
(* val replicate : 'a -> 'a par *)
let replicate x =
mkpar (fun pid -> x)
(* val apply2 : ('a -> 'b -> 'c) par -> 'a par -> 'b par -> 'c par
let apply2 f x y =
apply (apply f x) y
(* val get_one; 'a par -> int par -> ' a par *)
let get_one datas srcs =
let pids = parfun (fun i->natmod i (bsp_p())) srcs in
let ask = put(parfun (fun i dst->if dst=i then Some() else None) pids)
and replace_by_data =
parfun2 (fun f d dst->match(f dst)with Some() -> Some d|_->None) in
let reply = put(replace_by_data ask datas) in
parfun (fun(Some x)->x) (apply reply pids)
replicate, apply2 and get_one are part of the module Stdlib.Base and Stdlib.Comm.
As explained in the introduction, parallel vectors must not be nested. The programmer is responsible for this absence of nesting. A program containing e.g. a type int par par will have a unpredictable behaviour. This kind of nesting is easy to detect. But nesting can be more difficult to detect, e.g :
let vec1 = mkpar (fun pid -> pid)
and vec2 =
get_one
(replicate 1)
(mkpar (fun pid->if pid=0
then last()
else pid-1)) in
let couple1 = (vec1,1)
and couple2 = (vec2,1) in
mkpar (fun pid -> if pid<(bsp_p())/2
then snd (couple1)
else snd (couple2))
Objective Caml being a strict language, the evaluation of the last expression would imply the evaluation of vec1 on the first half of the network and vec2 on the second half of the network. But a get implies a synchronization barrier and a mkpar implies no synchronization barrier. So this will lead to mismatched barriers and the bevahiour of the program will be unpredictable.
In order to avoid such problems, is is sufficient that every subexpression of a sequential expression (i.e. with no par type) is also sequential. The only exception is at whose type is bool par -> int -> bool. But at must only be used in a if then else expression and the two branches of the conditional must be non-sequential expressions.
We have now a polymorphic type system which ensures the absence of such nesting [12, 11]. There is no implementation which supports the whole Objective Caml language.
 bspstep
bspstep